ه½“ه‰چن½چç½®: 首é،µ >> و£و–‡
‹¹نh´‹ç‰§هœ؛ه»ّ™®¾çڑ„ه…³é”®وٹ€وœ¯ه’Œو–زژ(gu¨©)³•
م€€ ‹¹نh´‹ç‰§هœ؛وک¯وŒ‡هںقZ؛ژ‹¹نh´‹ç”ںو€پç³»¾lںç”ں物ن¸ژçژ¯ه¢ƒç›و€؛’ن½œç”¨çڑ„هژںçگ†ï¼Œهœ¨ç‰¹ه®ڑو“vهںںه†…هQŒé€ڑè؟‡ه»ّ™®¾ن؛؛ه·¥é±¼ç¤پم€پو“vè—صdœ؛م€پو“vèچ‰ه؛ٹ½{‰ه·¥½E‹ï¼Œو„ه¾ڈوˆ–ن؟®ه¤چو“v‹z‹ç”ں物ç¹پŒD–م€پç”ںé•ر€پ烦(ch¨³)饵ه’Œéپ؟و•Œو‰€éœ€çڑ„هœ؛و‰€هQŒهئˆ¾l“هگˆه¢و®–و”¾وµپم€پç”ں物驯هŒ–وژ§هˆ¶م€پن¼‘é—²و¸”ن¸ڑه¼€هڈ‘م€پ资و؛گçژ¯ه¢ƒç›‘‹¹‹ه’Œه·،وں¥½ژ،وٹ¤½{‰وژھو–½ï¼Œه®çژ°‹¹·هںںç”ںو€پçژ¯ه¢ƒو”¹ه–„م€پو¸”ن¸ڑ资و؛گè‡ھ然ه¢ŒD–هڈٹ(qi¨¢ng)وŒپ箋هپ¥ه؛·ه¼€هڈ‘هˆ©ç”¨çڑ„ه¤چهگˆه‹و¸”ن¸ڑو¨،ه¼ڈم€?span style="margin: 0px; padding: 0px; outline: 0px; color: rgb(0, 128, 255); visibility: visible; max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">‹¹نh´‹ç‰§هœ؛ه»ّ™®¾çڑ„ç›®çڑ„هŒ…و‹¬وپ¢ه¤چهئˆوڈگé«ک?g¨°u)¹·هںںç”ں物ه¤ڑو ·و€§ه’Œو¸”ن¸ڑ资و؛گé‡ڈم€پن»¥¼‹®ن؟و¸”ن¸ڑ资و؛گوŒپ箋½E›_®ڑه¢é•؟هQŒن»¥هڈ?qi¨¢ng)هœ¨وŒپ箋é«کو•ˆهˆ©ç”¨‹¹نh´‹èµ„و؛گçڑ„هگŒو—¶ن؟وٹ¤و“v‹z‹ç”ںو€پç³»¾lںم€په®çژ°و“v‹z‹و¸”ن¸ڑوŒپ¾lهپ¥ه؛·هڈ‘ه±•م€?/strong>¾lڈè؟‡ه¤ڑه¹´هڈ‘ه±•هQŒوˆ‘ه›½و“v‹z‹ç‰§هœ؛ه·²ه»ّ™®¾ه½¢وˆگن¸€ه®ڑ规و¨،,هœ¨ه¢ŒD–ه’Œوپ¢ه¤چو¸”ن¸ڑ资و؛گم€پن؟®ه¤چه’Œو”¹ه–„‹¹نh´‹ç”ںو€پçژ¯ه¢ƒم€پن؟ƒ(j¨©)کq›و¸”و°‘è{ن؛§ه¢و”¶ç‰و–ڑw¢هڈ–ه¾—ن؛?ji¨£n)وک¾è‘—و•ˆوœم€‚ن½†ç”׃؛ژèµنh¥è¾ƒو™ڑهQŒوˆ‘ه›½و“v‹z‹ç‰§هœ؛هڈ‘ه±•و€ضM½“ن»چه¤„ن؛ژهˆ¾U§éک¶ŒDµï¼Œهکهœ¨ç ”究هں؛ç،€è–„ه¼±م€پ科وٹ€و°´هم^èگ½هگژم€پو”¯و’‘هڈ‘ه±•ن¸چ‘³ç‰é—®é¢کم€‚ه› و¤ï¼Œ‹¹نh´‹ç‰§هœ؛ه…³é”®وٹ€وœ¯çڑ„ç ”ç©¶ه·²وˆگن¸؛وˆ‘ه›½â€œè“色粮ن»“â€ه¾ڈ设ن؛ںه¾…解ه†³çڑ„é‡چè¦پé—®é¢کم€‚وœ¬و–‡هœ¨¾lئD؟°ه›½ه†…ه¤–و“v‹z‹ç‰§هœ؛ه¾ڈ设وٹ€وœ¯ç ”½I¶è؟›ه±•çڑ„هں؛ç،€ن¸ٹ,هˆ†وگه’Œو€ب»“ن؛?ji¨£n)و“v‹z‹ç‰§هœ؛ه¾ڈ设ن¸6™هزژ(gu¨©)ٹ€وœ¯çڑ„ç ”ç©¶و–زژ(gu¨©)³•هQŒéکگکqîC؛†(ji¨£n)کq?™هزژ(gu¨©)ٹ€وœ¯çڑ„ن¼ک点ه’Œن¸چ‘»I¼Œن¸؛وˆ‘ه›½و“v‹z‹ç‰§هœ؛çڑ„؟U‘ه¦ه»ّ™®¾وڈگن¾›هڈ‚考م€?/span>
1
‹¹نh´‹ç‰§هœ؛ç”ں物资و؛گ评ن¼°وٹ€وœ?/strong>
م€€م€€‹¹نh´‹ç‰§هœ؛ç”ں物资و؛گçڑ„监‹¹‹ه’Œè¯„ن¼°وک¯هں؛ن؛ژ电(sh¨´)هگه’Œه£°ه¦هژںçگ†هQŒè¯„ن¼°و“v‹z‹ç‰§هœ؛ç”ں物资و؛گçٹ¶ه†ëٹڑ„وٹ€وœ¯م€?/strong>ه…¶ن¸هQ?span style="margin: 0px; padding: 0px; outline: 0px; color: rgb(255, 76, 0); max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">وژ¢é±¼ن»?/strong>هڈ¯ن»¥èژ·هڈ–‹¹نh´‹ç‰§هœ؛部هˆ†ç”ں物çڑ„و¸¸و³³é€ںه؛¦م€پè؟گهٹ¨و–¹هگ‘م€پç”ں物ç§چ¾ں¤هژڑه؛¦ه’Œه¯†ه؛¦ن¸ه؟ƒ(j¨©)½{‰و¸”ن¸ڑ资و؛گن؟،وپ¯م€‚هˆکو€هڈŒè®¾è®،ن؛?ji¨£n)ن¸€؟Uچه¤ڑو³¢وںهڈŒé¢‘وژ¢é±¼ن»ھ,ٍq¶هœ¨و¹–و³ٹن¸ه®Œوˆگن؛†(ji¨£n)试éھŒم€‚ه¼ ®ڈ辉م€په¼ و·‘ه¨ںه¯¹ه¤ڑو³¢وںوژ¢é±¼ن»ھن؟،هڈïL(f¨¥ng)ڑ„采集ه¤„çگ†ن»¥هڈٹ(qi¨¢ng)وک¾وژ§ٍq›_ڈ°کq›è،Œن؛?ji¨£n)ç ”½Iس¼Œن¸قZ؛†(ji¨£n)وڈگé«کوک¾وژ§è½¯نڑgçڑ„هڈ¯é و€§ï¼Œ®†VxWorksهµŒه…¥ه¼ڈç³»¾lںه؛”用ن؛ژه¤ڑو‡Lوںوژ¢é±égبAوک¾وژ§ٍq›_ڈ°çڑ„ه¼€هڈ‘م€‚وژو›´ه¯¹ه¤ڑو‡Lوںوژ¢é±égبAçڑ„ه¤ڑé€ڑéپ“هڈ‘ه°„وœ؛م€په¤ڑé€ڑéپ“وژ¥و”¶وœ؛م€پ电(sh¨´)و؛گç³»¾lںن»¥هڈ?qi¨¢ng)و•°ه—ن؟،هڈ·ه¤„çگ†هم^هڈ°çڑ„逻辑设è®،و–زژ(gu¨©)،ˆکq›è،Œن؛?ji¨£n)ç ”½I¶م€‚نط“(f¨´)ن؛?ji¨£n)ن‹ةوژ¢é±¼ن»ھو›´هٹ ن¾؟وگ؛,وœچهٹ،ن¼‘é—²ه¨×ƒ¹گçڑ„需و±‚,وژن؛‘¾U¢ç‰هˆ©ç”¨Wi-Fiوٹ€وœ¯ه°†و‰‹وœ؛APPن¸ژç،¬ن»¶ç»“هگˆï¼Œè®¾è®،ن؛?ji¨£n)ن¸€‹ئ¾ن¾؟وگ؛ه¼ڈوژ¢é±¼¾pب»ںهQŒè¯¥وژ¢é±¼¾pب»ں能ه¤ںو زژ(gu¨©)چ®ه›و‡Lن؟،هڈ·هˆ¤هˆ«ç›®و ‡هQŒهئˆو¸…و™°هœ°وک¾½C؛هœ¨و‰‹وœ؛ه؛”用½E‹ه؛ڈç•Œé¢ن¸ٹم€‚ن½†ç”׃؛ژوژ¢é±¼ن»ھèژ·ه¾—çڑ„و•°وچ®وک¯هœ¨ه¤چو‚çڑ„و“v‹z‹çژ¯ه¢ƒن¸‹é‡‡é›†çڑ„,وœھçں¥ه’Œن¸چ¼‹®ه®ڑçڑ„ه› ç´ ن¼ڑ(x¨¬)ه¯زژ(gu¨©)•°وچ®é€ وˆگ较ه¤§ه½±ه“چهQŒç›¸ه¯¹ن؛ژوژ¢é±¼ن»ھçڑ„هڈ‘ه±•هQŒç›®ه‰چوˆ‘ه›½هœ¨وژ¢é±¼ن»ھو•°وچ®é¢„ه¤„çگ†و–ڑw¢çڑ„ç ”½I¶è¾ƒ?y¨u)®‘م€?/span>
م€€م€€هˆ©ç”¨و°´ه£°ه¦وٹ€وœ¯و¥ç›‘وµ‹و¸”ن¸ڑ资و؛گهچپهˆ†é«کو•ˆهQŒن¸چن½†ه¯¹èµ„و؛گو²،وœ‰ç ´هڈو€§ï¼Œè€Œن¸”و‘†è„±ن؛?ji¨£n)ه…‰ه¦و³•ن¸ه…‰و³¢ن¼ و’è·¼›بںçڑ„ç¼؛ç‚ڈV€?/strong>و±¤ه‹‡½{‰é’ˆه¯¹ن¸€èˆ¬ه¤§é™†و¶و°´هںںم€پو“v‹z‹ç‰§هœ؛ه’Œو·،و°´و¹–و³ٹ½{‰ç”ںه¢ƒï¼Œç ”究鱼类ه’ŒوصQو¸¸هٹ¨ç‰©çڑ„و°´ه£°ه¦è¯†هˆ«ه’Œç›‘وµ‹وٹ€وœ¯م€‚هœ¨وˆ‘ه›½هچ—و“vهQŒç ”½I¶è€…ه€ںهٹ©ç”ں物ه¦و‹–¾|‘采و نhٹ€وœ¯ï¼Œهˆ©ç”¨Echoview 软نڑgه¯¹ه£°ه¦و•°وچ®è؟›è،Œهˆ†وگه¤„çگ†ï¼Œ¾l“هگˆو¸”ن¸ڑ资و؛گو‹–网و•°وچ®هQŒه¯¹ç”ں物资و؛گé‡ڈè؟›è،Œè¯„ن¼°م€?span style="margin: 0px; padding: 0px; outline: 0px; color: rgb(255, 76, 0); max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">و¤ه¤–هQŒهں؛ن؛ژه£°ه¦هھ„(ji¨£ng)هƒڈهˆ†وگه’Œو¸”ن¸ڑ资و؛گè°ƒوں¥¾l“وœهQŒه¯¹‹¹نh´‹ç‰§هœ؛و¸”ن¸ڑ资و؛گکq›è،Œè¯„ن¼°çڑ„و–¹و³•ï¼ŒéھŒè¯پن؛?ji¨£n)ه£°ه¦و–¹و³•هœ¨‹¹نh´‹ç‰§هœ؛و¸”ن¸ڑ资و؛گ评ن¼°ن¸çڑ„و•ˆوœم€?/strong>ç”׃؛ژèµنh¥è¾ƒو™ڑهQŒوˆ‘ه›½ه¯¹ن؛ژé±¼¾ں¤çڑ„éپ®è”½و•ˆه؛”م€پهڈ¯èƒ½هکهœ¨çڑ„ه›éپ؟è،Œنط“(f¨´)ن»¥هڈٹ(qi¨¢ng)هˆ©ç”¨ه£°ه¦ه›و‡Lو¥è¯†هˆ«هŒ؛هˆ†é±¼¾cبڑ„ç ”ç©¶کqکن¸چه¤ں,相ه؛”çڑ„é±¼¾cصd£°ه¦و•°وچ®ه؛“çڑ„و„ه»ّ™؟کوœ‰ه¾…کq›ن¸€و¥ç ”½I¶م€?/span>

2
‹¹نh´‹ç‰§هœ؛ç”ں物ه¢و®–وٹ€وœ?/strong>
م€€م€€‹¹نh´‹ç‰§هœ؛ç”ں物ه¢و®–وٹ€وœ¯وک¯وŒ‡ن‹ة用و”¾‹¹پم€په؛•و’م€پ移و¤چç‰ن؛؛ه·¥و–¹ه¼ڈهگ‘و“v‹z‹ç‰§هœ؛وٹ•و”¾èµ„و؛گه…³é”®ç§چن؛²ن½“م€پç§چè‹—ç‰و°´ç”ںç”ں物ن»¥ه¢هٹ ه…¶èµ„و؛گé‡ڈ,解ه†³‹¹نh´‹ç‰§هœ؛è‡ھ然؟Uچ群è،¥ه……ن¸چèƒِ½{‰é—®é¢کم€?/strong>
م€€م€€ه›½ه†…ن¸»è¦پç ”ç©¶ن؛?ji¨£n)çœںé²—÷€پ许و°ڈهم^鲉م€پ牙鲆م€پé²چé±¹{€پو“v胆م€پهˆ؛هڈ‚ç‰هœ¨ن¸چهگŒç»“و„م€پوگو–™é±¼½Cپè،¨é¢çڑ„附ç€و•ˆوœن¸ژه‘¨ه›´çڑ„èپڑ集و•ˆوœهQŒن»ژç”ں物ه¦è§’ه؛¦نط“(f¨´)ن؛؛ه·¥é±¼ç¤پçڑ„结و„选ه‹وڈگن¾›ن¾وچ®م€‚هœ¨و¤هں؛¼‹€ن¸ٹ,é€گو¸گه½¢وˆگن؛?ji¨£n)适ه®œçڑ„ه¢ŒD–ç§چ¾cب›é€‰وµپ½E‹ï¼Œٍq¶ه¾ڈç«‹ن؛†(ji¨£n)ç”ںو€پç³»¾lںو°´ٍq³çڑ„ه¢و®–؟Uچç±»ç”ںو€په®¹é‡ڈ评ن¼°وٹ€وœ¯م€‚و„ه»قZ؛†(ji¨£n)èچهگˆه¢و®–¾ں¤ن½“و•°é‡ڈهٹ¨و€پم€پç”ںو€پ适هگˆه؛¦ه’Œç”ںو€پé£ژ险ن؛ژن¸€ن½“çڑ„ه¢و®–و•ˆوœé‡ڈهŒ–评ن¼°وŒ‡و ‡ن½“ç³»هQŒه¾ڈç«‹ن؛†(ji¨£n)ن»¥è°ƒوں¥ه®‹¹‹ه’Œو¨،ه‹و¨،و‹ںن¸؛و ¸ه؟?j¨©)çڑ„ه¢و®–هٹںو•ˆè¯„ن¼°و–ز?gu¨©)³•هQŒç ”هڈ‘ن؛†(ji¨£n)هںقZ؛ژه›وچ•ه¼؛ه؛¦ه’Œه›وچ•è§„و ¼çڑ„ه¢و®–资و؛گé«کو•ˆهˆ©ç”¨و–¹ه¼ڈم€‚é’ˆه¯زژ(gu¨©)“v‹z‹ç‰§هœ؛牧هŒ–ه“پ؟Uچه¢ŒD–و”¾‹¹پوٹ€وœ¯ç ”هڈ‘ن؛†(ji¨£n)适ه®œو€§ه“پ؟Uچç›é€‰وٹ€وœ¯م€پوœ€é€‚و”¾‹¹پ规و ¼ه’Œو•°é‡ڈوٹ€وœ¯م€پ鱼虾苗؟Uچن¸é—´هں¹è‚²وٹ€وœ¯م€پو ‡ه؟—و”¾‹¹پوٹ€وœ¯ï¼Œç›®ه‰چوˆ‘ه›½ه·²ه¾ڈç«‹è“vهچ—و“vç”ںو€په¢ŒD–ه‹م€پن¸œ‹¹¯‚پڑé±¼ه¢ŒD–ه‹ه’Œé»„‹¹نh“vçڈچه“په¢و®–ه‹و“v‹z‹ç‰§هœ؛é…چه¥—وٹ€وœ¯و¨،ه¼ڈ,ٍq¶ه¾ڈç«‹ن؛†(ji¨£n)‹¹نh´‹ç‰§هœ؛ç«‹ن½“وœ€ن½?j¨©ng)_¢ŒD–وٹ€وœ¯و¨،ه¼?/strong>هQŒوœ‰هٹ›وژ¨هٹ¨ن؛†(ji¨£n)وˆ‘ه›½‹¹نh´‹ç‰§هœ؛çڑ„ه¾ڈ设م€?/span>
3
‹¹نh´‹ç‰§هœ؛ه¯¹è±،物ç§چ驯هŒ–وژ§هˆ¶وٹ€وœ?/strong>
م€€م€€ه¯¹è±،物ç§چ驯هŒ–وژ§هˆ¶وٹ€وœ¯وک¯ن»¥è،Œن¸؛ه¦çگ†è®؛ن¸؛هں؛¼‹€هQŒهˆ©ç”¨é«ک؟U‘وٹ€و‰‹و®µهQŒه¾ڈç«‹ه¯¹è±،ç”ں物è،Œن¸؛驯هŒ–ç³»¾lں,ن»ژه£°م€په…‰م€پ电(sh¨´)م€پç£پ½{‰ن¸ژé±¼ç¤په’Œé¥µو–™ç‰ç‰©çگ†م€پç”ں物و‰‹و³•ç›¸¾l“هگˆé©¯هŒ–ه¯¹è±،ç”ں物هQŒن‹ةه…¶ن»ژهڈ‘ç”ںهˆ°وچ•èژ·ه§‹¾lˆهڈ—هˆ°وœ‰و•ˆçڑ„è،Œنط“(f¨´)وژ§هˆ¶çڑ„وٹ€وœ¯م€?/strong>ç ”ç©¶è€…هœ¨é»„و¸¤‹¹·ه¯¹é‡چè¦پوپ‹ç¤پو€§é±¼¾c»è®¸و°ڈهم^鮋çڑ„éں›_“چ驯هŒ–و—¶و®µکq›è،Œن؛?ji¨£n)هˆو¥ç ”½I¶م€‚وœ‰ه¦è€…ه¼€هڈ‘ن؛†(ji¨£n)و— نhه€¼ه®ˆه¼ڈ驯هŒ–装¾|®هڈٹ(qi¨¢ng)و°´ن¸‹è§†é¢‘监وژ§¾pب»ںهQŒه¾ڈç«‹ن؛†(ji¨£n)黑鲷½{‰é‡چ点牧هŒ–ه“پ؟Uچçڑ„éں›_“چ驯هŒ–وٹ€وœ¯ï¼Œو„ه¾ڈن؛?ji¨£n)驯هŒ–و•ˆوœè¯„ن¼°و–¹ه¼ڈه’Œç”ںو€پé«کو•ˆçڑ„驯هŒ–è‹—ç§چ采وچ•و–¹ه¼ڈم€?span style="margin: 0px; padding: 0px; outline: 0px; color: rgb(255, 76, 0); max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">هœ¨هچ—‹¹ّP¼Œو”¾وµپ物ç§چè،Œنط“(f¨´)وژ§هˆ¶وٹ€وœ¯ن¸»è¦پن»¥éں›_“چ驯هŒ–¾l“هگˆé¥‰|–™وٹ•ه–‚çڑ„و–¹ه¼ڈï¼Œç ”هڈ‘é±ئD™¾â€œه£°é¢?饵诱â€é©¯هŒ–وژ§هˆ¶وٹ€وœ¯ï¼Œه…¶ه؛”用و•ˆوœهˆو¥وک¾çژ°م€?/strong>هگŒو—¶ç ”هڈ‘ن؛?ji¨£n)و“vن¸ٹه…¨è‡ھهٹ¨éں›_“چ驯هŒ–و–°è®¾ه¤‡ï¼Œ¾l“هگˆ‹¹·ن¸ٹçژ°هœ؛试éھŒçڑ„و–¹و³•ï¼Œه»؛ç«‹¾|‘وچ•م€پو½œé‡‡م€پو¸¸é’?/strong>½{‰é‡‡وچ•وٹ€وœ¯ï¼Œوڈگé«کن؛?ji¨£n)نٌ”ه‡؛و•ˆç?ٍq¶ه¼€ه±•ن؛†(ji¨£n)و°”وˆِ(ch¨£ng)ٍq•و‹¦وˆھوٹ€وœ¯è¯•éھŒç ”½Iس¼Œ¼‹®ه®ڑن؛?ji¨£n)وœ€ن½دx‹¦وˆھو•ˆوœو°”و³،ه¹•ه¯†ه؛¦م€?strong style="margin: 0px; padding: 0px; outline: 0px; max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">éں›_“چ驯هŒ–وک¯ه¢هٹ و“v‹z‹ç‰§هœ؛ه›وچ•çژ‡çڑ„و‰‹ŒDµن¹‹ن¸€هQŒç›®ه‰چ该وٹ€وœ¯هœ¨وˆ‘ه›½çڑ„ç ”½I¶ه°ڑن¸چو·±ه…¥ï¼Œه¤„ن؛ژ试éھŒéک¶و®µم€?/strong>
4
ن؛؛ه·¥é±¼ç¤پو°´هٹ¨هٹ›ç‰¹و€§وٹ€وœ?/strong>
م€€م€€هœ¨و‡Lم€پوµپن½œç”¨ن¸‹نhه·¥é±¼½Cپçڑ„و°´هٹ¨هٹ›ç‰¹و€§ن¸چن»…ه†³ه®ڑç€ه…¶ه‘¨ه›´çڑ„‹¹پهœ؛و•ˆه؛”هQŒè€Œن¸”ه½±ه“چه…¶è‡ھيw«çڑ„½E›_®ڑو€§ï¼Œé€ڑè؟‡é•؟و—¶é—´çڑ„و”„،½®هQŒè؟™؟Uچ特و€§ه¯¹é±¼ç¤په‘¨ه›´çڑ„هŒ–ه¦م€پç”ںو€پçژ¯ه¢ƒه°†ن؛§ç”ںه·¨ه¤§çڑ„هھ„(ji¨£ng)ه“چ,ه› و¤ç ”究ن؛؛ه·¥é±¼ç¤پçڑ„و°´هٹ¨هٹ›ç‰زژ(gu¨©)€§وک¯هڈ‘ه±•ن؛؛ه·¥é±¼ç¤پçڑ„ه…³é”®م€?/span>
م€€م€€و—¥وœ¬è‡?0ن¸–ç؛ھ60ٍq´ن»£ه¼€ه§‹ه¯¹ن؛؛ه·¥é±¼ç¤پçڑ„و°´هٹ¨هٹ›ه¦ç‰¹و€§è؟›è،Œè¾ƒن¸؛ç³»¾lںçڑ„ç ”ç©¶م€‚é€ڑè؟‡و°´و§½و¨،ه‹è¯•éھŒهQŒه®ڑé‡ڈç ”½I¶ن؛†(ji¨£n)½Cپن½“و¨،ه‹ه‘¨ه›´‹¹پهœ؛çڑ„هڈکهŒ–هڈٹ(qi¨¢ng)ه½±ه“چ范ه›´هQŒهئˆن»ژه¾ˆه¤ڑ试éھŒو•°وچ®ن¸و€ب»“ه‡قZ¸چهگŒç¤پن½“و¨،ه‹çڑ„‹¹پن½“هٹ›ه¦ç‰زژ(gu¨©)€§ï¼Œن¸قZhه·¥é±¼½Cپو„ه‹ن¼کهŒ–وڈگن¾›ن؛†(ji¨£n)؟U‘ه¦و•°وچ®م€‚马و¥è¥؟ن؛ڑه¦è€…ç ”½I¶ن؛†(ji¨£n)ن¸€؟Uچو–°ه‹ç»“و„نhه·¥é±¼½C? ه¤´ç›”ن؛؛ه·¥½Cپن½“) çڑ„و°´هٹ¨هٹ›ç‰زژ(gu¨©)€§ï¼Œکq™ç§چ½Cپن½“ن¸ن¸چهگŒه¼€هڈ£çڑ„ç‰زژ(gu¨©)®ٹه½¢çٹ¶و”¹ه–„ن؛?ji¨£n)هچ•ه…ƒه†…‹¹پé€ںهˆ†ه¸ƒوƒ…ه†µï¼Œن»ژ而ه¢هٹ ن؛†(ji¨£n)½Cپه†…و¸”ن¸ڑ资و؛گçڑ„ç”ں物é‡ڈم€?/span>
م€€م€€هœ¨ه›½ه†…,针ه¯¹و–¹ه‹½Cپم€په¤ڑ‹‚±وں±ه‹ç¤پم€پهœ†½ژ،ه‹½Cپم€پوکںن½“ه‹½Cپم€پM ه‹ç¤پم€په¤§ه‹ç»„هگˆه¼ڈç”ںو€پç¤پ½{‰ï¼Œé‡‡ç”¨¾_’هگه›‘ضƒڈ‹¹‹é€ںوٹ€وœ?/strong>( particleimage velocimetryهQŒPIV)م€?strong style="margin: 0px; padding: 0px; outline: 0px; max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">è®،ç®—وœ؛و•°ه€¼و¨،و‹ںوٹ€وœ¯م€?/strong>و°´و§½è¯•éھŒه’?strong style="margin: 0px; padding: 0px; outline: 0px; max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">é£ژو´è¯•éھŒ½{‰ç‰©çگ†و¨،ه‹ه’Œن»؟çœںهˆ†وگهQŒç ”½I¶ن؛†(ji¨£n)هچ•ن½“é±¼ç¤په½¢çٹ¶م€په°؛ه¯¸ه¯¹ه‘¨ه›´‹¹پن½“‹¹پو€پçڑ„ه½±ه“چهQŒنط“(f¨´)é±¼ç¤پ¾l“و„ن¼کهŒ–وڈگن¾›؟U‘ه¦ن¾وچ®م€‚é’ˆه¯¹ه¤چو‚ç¤پ¾ں¤ï¼Œه¼•ه…¥é€ڑé€ڈç³»و•ژح¼Œé€ڑè؟‡ه»؛ç«‹é€ڑé€ڈç³»و•îC¸ژ½Cپن½“ه‘¨ه›´‹¹پهœ؛çڑ„ه…³¾p»ï¼Œه®çژ°ه¤چو‚½Cپن½“½ژ€هچ•هŒ–هQŒنط“(f¨´)ه¤§èŒƒه›´و¨،و‹ںç¤پ¾ں¤ه‘¨ه›´وµپهœ؛وڈگن¾›ن¸€؟Uچو–°و€èµ\م€‚é€ڑè؟‡هˆ†وگن¸چهگŒ½Cپن½“و‘†و”¾و–¹ه¼ڈه’Œç»„هگˆه¸ƒه±€و¨،ه¼ڈه¯زژ(gu¨©)µپهœ؛هˆ†ه¸ƒçڑ„ه½±ه“چهQŒنط“(f¨´)هچ•ن½چé±¼ç¤پçڑ„é…چ¾|®è§„و¨،م€په¸ƒه±€و–¹ه¼ڈه’Œو‘†و”¾è®¾è®،وڈگن¾›هڈ‚考م€?/span>
م€€م€€و°´و§½è¯•éھŒوˆ–é£ژ‹z试éھŒهڈھ能هڈچوک نhه·¥é±¼½Cپه‘¨ه›´ه±€éƒ¨çڑ„‹¹پé€ںوµپهگ‘,ن¸چ能ه¯زژ(gu¨©)•´ن¸ھوµپهœّ™؟›è،Œه‡†¼‹®م€په…¨é¢çڑ„هˆ†وگهQŒéڑڈç€è®،ç®—وœ؛وٹ€وœ¯çڑ„هڈ‘ه±•هQŒو•°ه€¼و¨،و‹ں能ه¤ںه‡†¼‹®و¨،و‹ںé±¼½Cپه‘¨ه›´çڑ„‹¹پهœ؛م€?strong style="margin: 0px; padding: 0px; outline: 0px; max-width: 100%; box-sizing: border-box !important; overflow-wrap: break-word;">ç›®ه‰چهQŒوˆ‘ه›½ه¯¹ن؛ژوµپهœ؛و•ˆه؛”çڑ„ç ”ç©¶و–زژ(gu¨©)³•ه·²ç»ڈé€گو¸گن»ژهچ•ن¸€çڑ„é£ژ‹z试éھŒم€پو°´و§½è¯•éھŒنط“(f¨´)ن¸»ï¼Œè½¬نط“(f¨´)ن»¥و•°ه€¼و¨،و‹ںو–¹و³•نط“(f¨´)ن¸…R€?/strong>®¤ه…¶وک¯è؟‘ه‡ ه¹´هQŒهˆ©ç”¨FLUENT 软نڑgه¯ڑw±¼½Cپه‘¨ه›´وµپهœّ™؟›è،Œو¨،و‹ںçڑ„ç ”ç©¶هڈ‘ه±•ه¾ˆه؟«هQŒه¯¹و–¹ه‹½Cپم€په¤ڑ‹‚±وں±ه‹ç¤پم€پهœ†½ژ،ه‹½Cپ牾cصd‹½Cپن½“کq›è،Œن؛?ji¨£n)وµپهœ؛çڑ„و¨،و‹ںهQŒن»ژن؛Œç»´و•°ه€¼و¨،و‹ںو‰©ه±•هˆ°ن¸‰ç»´و•°ه€¼و¨،و‹ں,ٍq¶ه¯¹و¯”هˆ†وگن؛†(ji¨£n)ن¸چهگŒو¨،ه‹çڑ„و¨،و‹ںو•ˆوœم€‚و—ه†›ç‰ç ”究è،¨وکژهQŒé‡‡ç”¨ه¤§و¶،و¨،و‹ںو³•(large eddy simulationهQŒLES)çڑ„و¹چ‹¹پو¨،ه‹و¨،و‹ںçڑ„و¶،و—‹کqگهٹ¨çڑ„هڈکهŒ–و›´½W¦هگˆه®é™…çڑ„وµپهٹ¨ï¼Œن¸قZ»¥هگژçڑ„ç ”ç©¶وڈگن¾›هڈ‚考م€‚ç”±ن؛ژPIVوٹ€وœ¯éپ؟ه…چن؛†(ji¨£n)و™®é€ڑو°´و§½è¯•éھŒن¸وژ¥è§¦ç‚¹ه¹²و‰°ه’Œ‹¹‹è¯•ç‚¹ن¸چ‘³çڑ„¾~؛é™·هQŒèƒ½هœ¨ç¬é—´è®°ه½•ن¸‹ه¤§é‡ڈ½I؛é—´ن¸ٹçڑ„é€ںه؛¦ن؟،وپ¯هQŒو°´و§½è¯•éھŒن¹ںن»ژو™®é€ڑو°´و§½è¯•éھŒè{ن¸؛结هگˆPIV çڑ„و°´و§½è¯•éھŒوˆ–وک¯هˆ©ç”¨è®،½ژ—وœ؛و•°ه€¼و¨،و‹ںçڑ„و°´و§½è¯•éھŒم€‚هœ¨وŒپ箋çڑ„ç ”½I¶ن¸هQŒه…³ن؛ژوµپهœ؛و•ˆه؛”çڑ„评نh(hu¨¢n)ن½“ç³»و£هœ¨ن¸چو–ه®Œه–„هQŒé©¬èچچو²£½{‰é’ˆه¯¹ن¸چهگŒه¼€هڈ£و¯”çڑ„نhه·¥é±¼½Cپه¯¹ه‘¨ه›´‹¹پهœ؛و•ˆه؛”çڑ„هھ„(ji¨£ng)ه“چè؟›è،Œن؛†(ji¨£n)ه…¨é¢è¯„نh(hu¨¢n)هQŒهˆو¥ه¾ڈç«‹ن؛†(ji¨£n)هںقZ؛ژ‹¹پهœ؛و•ˆه؛”ه½±ه“چçڑ„评ن»·ن½“¾p»ï¼Œن½†ç”±ن؛ژé±¼½Cپه‘¨ه›´ç”ںو€پç³»¾lںçڑ„ه¤چو‚و€§ï¼Œè¯„نh(hu¨¢n)ن½“ç³»کqکوœ‰ه¾…ن؛ژکq›ن¸€و¥ه®Œه–„م€?/span>
م€€م€€هœ¨نhه·¥é±¼½Cپ稳ه®ڑو€§çڑ„ç ”ç©¶و–ڑw¢هQŒن¸€èˆ¬é€ڑè؟‡çگ†è®؛è®،ç®—م€پé£ژ‹z试éھŒم€پو•°ه€¼و¨،و‹ںç‰èژ·ه¾—ن؛؛ه·¥é±¼ç¤پçڑ„وœ€ه¤§هڈ—هٹ›م€پوٹ—و¼‚移¾pہL•°م€پوٹ—ه€¾è¦†¾pہL•°½{‰هڈ‚و•°و¥کq›è،Œن؛؛ه·¥é±¼ç¤پ½E›_®ڑو€§çڑ„هˆ¤و–م€‚ç›®ه‰چé’ˆه¯¹هچپه—ه‹½Cپم€پé’¢هˆ¶ه››و–¹هڈ°ه‹ç¤پم€په›ه—ه‹½Cپم€پو–¹ه‹ç¤پ½{‰ï¼Œ¾l“هگˆه…¶وٹ•و”„،ڑ„‹¹·هںںçٹ¶ه†µéھŒè¯پن؛?ji¨£n)ç¤پن½“وٹ•و”‘ضگژçڑ„稳ه®ڑو€§م€‚ن½†ç›®ه‰چ½Cپن½“½E›_®ڑو€§çڑ„ç ”ç©¶ه¯¹ن؛ژو²‰é™چن½œç”¨ه¤ڑو•°هڈھè؟›è،Œن؛†(ji¨£n)ه®ڑو€§هˆ†وگ,ه…¶ه®ڑé‡ڈçڑ„و•°ه€¼و¨،و‹ںç ”½I¶è؟کوœ‰ه¾…کq›ن¸€و¥هڈ‘ه±•م€‚هœ¨é±¼ç¤په®ڑن½چوٹ•و”¾çڑ„ç ”½I¶و–¹é¢ï¼ŒهںقZ؛ژ®ڈوŒ¯ٍq…و‡Lه’Œهٹ›ه¦çگ†è®؛,ن»¥èRهڈ¶ه‹é±¼ç¤پن¸؛ç ”½I¶ه¯¹è±،,هˆ†وگن؛?ji¨£n)èRهڈ¶ه‹é±¼ç¤پهœ¨ن¸چهگŒو‡L‹¹ھم€پن¸چهگŒو°´و·±م€پن¸چهگŒو“vه؛ٹه،ه؛¦هڈٹ(qi¨¢ng)附ç€ç”ں物½{‰و،ن»¶ن¸‹çڑ„ه®‰ه…¨و€§ï¼Œ¼‹®ه®ڑن؛?ji¨£n)èRهڈ¶ه‹é±¼ç¤پçڑ„ه®‰ه…¨é‡چé‡ڈه’Œé€‚ه®œوٹ•و”¾çڑ„و°´و·قpŒƒه›´م€‚ç›®ه‰چ,ن؛؛ه·¥é±¼ç¤پçڑ„ه®ڑن½چوٹ•و”¾ن¾وچ®çڑ„é€ڑه¸¸وک¯ه¯¹é±¼ç¤پ½E›_®ڑو€§هڈٹ(qi¨¢ng)‹¹پهœ؛و•ˆه؛”½{‰çڑ„è®،ç®—¾l“وœهQŒè؟ک需è¦پهٹ ه¤§ه¯¹وٹ•و”¾‹¹·هںںçڑ„ه؛•è´¨و،ن»¶م€پو°´و–‡و،ن»¶ه’Œçژ¯ه¢ƒç”ں物½{‰çڑ„¾l¼هگˆè¯„ن¼°م€?/span>
5
ن؛؛ه·¥é±¼ç¤پ¾l“و„هڈ?qi¨¢ng)ه·¥½E‹وگو–™ه¼€هڈ‘وٹ€وœ?/strong>
م€€م€€ç›®ه‰چهQŒو—¥وœ¬وک¯ن¸–ç•Œن¸ٹنhه·¥é±¼½Cپه¾ڈé€ è§„و¨،وœ€ه¤§çڑ„ه›½ه®¶هQŒو—¥وœ¬çڑ„ن؛؛ه·¥é±¼ç¤په·²وœ‰300ه¤ڑç§چه½¢çٹ¶هQŒè€Œن¸”کqکهœ¨ن¸چو–ç ”هڈ‘و–°ه‹é±¼ç¤پم€‚و—¥وœ¬çڑ„ن؛؛ه·¥é±¼ç¤پ¾cصd‹هQŒوŒ‰ç…§é±¼½Cپçڑ„ن¸چهگŒهٹں能ه’Œن½œç”¨ï¼Œهˆ†نط“(f¨´)资و؛گه¢و®–ه‹é±¼½Cپم€پçژ¯ه¢ƒو”¹ه–„ه‹é±¼ç¤پم€پو¸”èژ·ه‹é±¼ç¤پم€پو¸¸é’“ه‹é±¼ç¤په’Œéک²و³¢ه ¤و„é€ ه‹é±¼ç¤پ½{?وŒ‰وٹ•و”¾و°´ه±‚هˆ†ن¸؛ه؛•ه±‚نhه·¥é±¼½Cپم€پو?zh¨¨n)¬‹¹®ه¼ڈن؛؛ه·¥é±¼ç¤پ½{?وŒ‰é±¼½Cپوگو–™ن¸چهگŒهˆ†ن¸؛وطœه‡هœںé±¼ç¤پم€پé’¢وگé±¼½Cپه’Œو··هگˆه‹é±¼½Cپç‰م€‚نط“(f¨´)ن؛?ji¨£n)و›´هگˆçگ†هœ°ه¾ڈ设نhه·¥é±¼½Cپ,و—¥وœ¬هœ¨نhه·¥é±¼½Cپه¾ڈ设ن¸ٹه‡؛çژ°ن؛?ji¨£n)و–°هٹ¨هگ‘هQŒه¼€ه§‹ه¾ڈ设è´ه£³ç¤پم€پé«که±‚é±¼½Cپç‰م€‚ه¾ڈ½{‘规و¨،ن»ژ®ڈهˆ°ه¤§ï¼Œه·²é€گو¸گه½¢وˆگن؛?ji¨£n)ç±»ه‹ه¤ڑو ·هŒ–م€پ结و„ه¤چو‚هŒ–م€پوگو–™çژ°ن»£هŒ–م€په¾ڈ½{‘规范هŒ–çڑ„نhه·¥é±¼½Cپه¾ڈ设ن½“¾p…R€?/span>
م€€م€€و„ڈه¤§هˆ©é€ڑè؟‡و”؟ه؛œه’Œو°‘é—´ه›¢ن½“ه…±هگŒوٹ•èµ„,وœ‰ç»„¾l‡م€پوœ‰è®،هˆ’م€پوœ‰½ژ،çگ†هœ°وٹ•و”ùN±¼½Cپ,除ن؛†(ji¨£n)هˆ©ç”¨ه؛ں船م€په؛ںè½®èƒژه¤–,کqکهˆ©ç”¨ç…¤çپ°ه’Œو··ه‡هœںوطœهگˆé±¼½Cپم€‚و¾³ه¤§هˆ©ن؛ڑه’Œ‹ئ§و´²هگ„ه›½ن¸»è¦پوک¯é€ڑè؟‡و²‰و”¾é€€ه½¹ه†›èˆ°ه’Œه؛ںو—§èˆ¹هڈھم€په؛ںè½®èƒژ½{‰ن½œن¸؛é±¼½Cپم€‚è¥؟çڈ牙وک¯ç”±و”؟ه؛œه’Œو°‘é—´ه›¢ن½“ن¸€èµنhٹ•èµ„ه¾ڈè®ùN±¼½Cپه’Œه®و–½½ژ،çگ†çڑ„و¬§‹z²ه›½ه®س¼Œé™¤وٹ•و”‘ض؛ںو—§èˆ¹ه’Œه؛ںè½®èƒژه¤–,ن¹ںهœ¨¼›پو¸”هŒ؛وٹ•و”‘ض¤§ه‹وطœه‡هœںو„نڑgهQŒç›®çڑ„وک¯éک²و¢و‹–网و¸”船ن½œن¸ڑه’Œن؟وٹ¤و¸”ن¸ڑ资و؛گم€‚马و¥è¥؟ن؛ڑم€پو³°ه›½م€پèڈ²ه¾‹ه®¾½{‰ه›½وٹ•ه…¥èµ„金ن¸چه¤ڑهQŒوٹ•½Cپو•°é‡ڈن¹ںن¸چه¤ڑهQŒه¤§éƒ¨هˆ†وک¯وٹ•و”‘ض؛ںو—§èˆ¹م€په؛ںè½®èƒژ½{‰ن½œé±¼ç¤پهQŒهڈھوœ‰ه°‘é‡ڈçڑ„é’¢ç‹و··ه‡هœںé±¼½Cپ,وœ‰ن؛›ç”ڑ至用竹م€پوœ¨م€پçں³ه—ن½œé±¼ç¤پم€‚ن½†ن¹ںوڈگه‡قZ؛†(ji¨£n)ن¸€ن؛›و–°ه‹ه¾ڈ½Cپوگو–™ï¼Œه¦‚هچ°®¼و”؟ه؛?‹¹نh´‹ن؛‹هٹ،ه’Œو¸”ن¸ڑ部وڈگه‡؛ن؛?ji¨£n)ن¸€؟Uچو–°وگو–™و¥هˆ¶é€ نhه·¥ç”ںه¢ƒï¼ŒهŒ…و‹¬ç”قpپڑن¸™çƒ¯ه،‘و–™(PP)هˆ¶وˆگçڑ„نhه·¥çڈٹ(qi¨¢ng)ç‘ڑç¤پم€‚马و¥è¥؟ن؛ڑç ”½I¶ن؛†(ji¨£n)香蕉ه؛ںو–™é¢—ç²’(BPP)ن¸ژه¾ڈ½{‘هƒهœ„،ڑ„ه†چç”ںéھ¨و–™و··ه‡هœ?RAC)ن½œنط“(f¨´)و²›_ڈ£ç”ںو€پç³»¾lںçڑ„ن؛؛ه·¥و··ه‡هœںç¤پçڑ„هˆ›و–°ç”¨é€”,ٍq¶ه·²ه¾—هˆ°و‰¹ه‡†ن½؟用هQŒوک¾è‘—解ه†³ن؛†(ji¨£n)ه›½ه®¶ه›قZ½“ه؛ں物½ژ،çگ†ن¸ژو±،وں“ن¸çڑ„ن¸€ن¸ھé—®é¢ک,وœ‰هٹ©ن؛ژو²³هڈ£ç”ںو€پç³»¾lںçڑ„¾l؟色هڈ¯وŒپ¾lهڈ‘ه±•م€?/span>
م€€م€€ن؛؛ه·¥é±¼ç¤پçڑ„结و„وک¯و زژ(gu¨©)چ®وٹ•و”¾‹¹·هںںçڑ„و‡L‹¹ھ特ه¾پم€پو“vو°´ه؛•è´¨م€پو“vو°´ç›گه؛¦ç‰ç‰©çگ†هŒ–ه¦ç‰¹ه¾پهڈ?qi¨¢ng)وٹ•½Cپç›®çڑ„و¥کq›è،Œè®¾è®،هQŒç”¨ن؛ژهڑgé•؟ç¤پن½“ه¯؟ه‘½م€په¢هٹ ç¤پن½“稳ه®ڑو€§ï¼Œوڈگé«ک½Cپن½“ç”ںو€پو•ˆç›ٹم€?/strong>ç›®ه‰چهQŒوˆ‘ه›½é’ˆه¯زژ(gu¨©)ٹ•و”¾و“vهںں设è®،ن؛†(ji¨£n)وکںه‹½Cپم€پهچپه—ه‹½Cپم€په›ه—ه‹½Cپم€پç”ںو€په¤چهگˆه‹½Cپم€پن¸‰è§’هإ½Cپç‰هQŒهئˆه¯¹ç¤پن½“هإçٹ¶è؟›è،Œن؛†(ji¨£n)ن¸€ه®ڑçڑ„و”¹è‰¯م€‚نط“(f¨´)ن؛?ji¨£n)适ه؛”هگ‘و›´و·±و“vهںںه¾ڈ设و“v‹z‹ç‰§هœ؛çڑ„需و±‚,çژ‹و±ںو¶›هœ¨‹¹®ه¼ڈé±¼ç¤پçڑ„هں؛¼‹€ن¸ٹ,设è®،ن؛?ji¨£n)ن¸€؟Uچهڈک?g¨°u)¹پé±¼½Cپ,该鱼½CپهŒ؛هˆ«ن؛ژه؛•ه±‚é±¼ç¤پهQŒهڈ¯ن»¥و?zh¨¨n)¬‹¹®ن؛ژ‹¹نh°´ن¸ï¼Œèƒ½ه¤ں®†ن¸ٹه±‚و¸©ه؛¦è¾ƒé«کم€پو؛¶و°§ه¤ڑه’Œé¥µو–™ç”ں物ن¸°ه¯Œçڑ„‹¹نh°´è¾“é€پهˆ°ن¸‹ه±‚م€‚و»،‘³ن؛†(ji¨£n)ن¸چهگŒهœ°هإم€پو“vهںںنhه·¥é±¼½Cپçڑ„ه»ّ™®¾éœ€و±‚م€?/span>
م€€م€€هœ¨ç¤پن½“وگو–™و–¹é¢ï¼Œé€ڑè؟‡ه¯زژ(gu¨©)طœه‡هœںم€پ金ه±م€پوœ¨وگم€پو©،胶م€پ粉煤çپ°م€پçں؟و¸£م€په·¥½E‹ه،‘و–™هڈٹ(qi¨¢ng)ه¤چهگˆه‹وگو–™çڑ„物çگ†و€§èƒ½م€پهŒ–ه¦ن½œç”¨م€پç”ں物附ç€م€پé±¼¾c»è¯±é›†م€پçژ¯ه¢ƒو•ˆه؛”ç‰کq›è،Œن؛?ji¨£n)ن¸€¾pصdˆ—çڑ„ç ”½Iس¼Œه¾—ه‡؛ه؛”用و•ˆوœوœ€ه¥½çڑ„وک¯وطœه‡هœںن؛؛ه·¥é±¼ç¤پم€‚é€ڑè؟‡ه¯¹ه‡èƒ¶وگو–™هڈٹ(qi¨¢ng)هگ„组هˆ†é…چو¯”çڑ„ن¼کهŒ–هQŒن¸چن»…هœ¨وٹ—هژ‹ه¼؛ه؛¦م€پç”ںو€پو•ˆه؛”م€پç”ں物附ç€و–ڑw¢وœ‰ن؛†(ji¨£n)وک¾è‘—وڈگهچ‡;کqکه……هˆ†هˆ©ç”¨ن؛†(ji¨£n)هگ„ç§چه؛ںه¼ƒوگو–™هQŒه¦‚ه†‰™‡‘و¸£م€پç‰،è›ژه£³م€پ粉煤çپ°م€پçں؟¾_‰م€پé’¢و¸£ه’Œç‚‰و¸£½{‰ï¼Œه®çژ°ن؛?ji¨£n)ن½ژ¼„³çژ¯ن؟م€‚é€ڑè؟‡و¨،و‹ں‹¹پهٹ¨‹¹نh°´çژ¯ه¢ƒن¸‹çڑ„و·نhƒ”هœںنçRèڑ€è¯•éھŒهQŒè®،½ژ—ه’Œé¢„وµ‹ن؛?ji¨£n)وطœه‡هœںن؛؛ه·¥é±¼ç¤پçڑ„è€گن¹…و€§ه¯؟ه‘½ï¼Œè،¨وکژé’¢و¸£ه¤چهگˆوگو–™و··ه‡هœںنhه·¥é±¼½Cپهœ¨è‡ھ然‹¹نh°´ن¸çڑ„ه¯؟ه‘½ه¤§ن؛ژه¼؛ه؛¦½{‰çٌ”ن¸؛C30م€پC35و··ه‡هœںنhه·¥é±¼½Cپçڑ„ه¯؟ه‘½هQŒن¸”é€ڑè؟‡é€‚ه½“ه¢هٹ ن؟وٹ¤ه±‚هژڑه؛¦هڈ¯وœ‰و•ˆوڈگé«کو··ه‡هœںوٹ—و°¯ç¦»هگنçRèڑ€çڑ„è€گن¹…و€§ه¯؟ه‘½م€‚ه¾ڈ½Cپوگو–™é€گو¸گهگ‘综هگˆهŒ–م€پن½ژ¼„›_Œ–هڈ‘ه±•هQŒوœ‰هˆ©ن؛ژ‹¹نh´‹ç‰§هœ؛çڑ„هڈ¯وŒپ箋هڈ‘ه±•م€?/span>
6
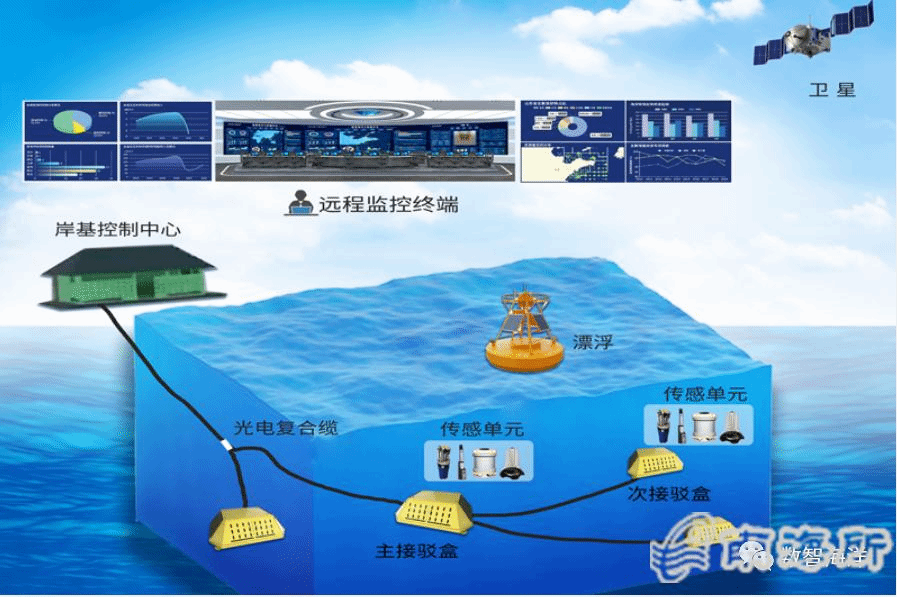
‹¹نh´‹ç‰§هœ؛监وµ‹وٹ€وœ?/strong>
م€€م€€‹¹نh´‹ç‰§هœ؛监وµ‹وٹ€وœ¯وک¯وŒ‡é€ڑè؟‡è®„،½®‹¹نh´‹çژ¯ه¢ƒç›‘وµ‹ç«™ç‚¹هQŒن‹ة用èپ”¾|‘ه’Œو— ç؛؟هڈ‘ه°„½{‰وٹ€وœ¯و‰‹ŒDµï¼Œه»؛ç«‹é’ˆه¯¹‹¹نh°´çژ¯ه¢ƒه…³é”®ه› هگçڑ„è‡ھهٹ¨ç›‘‹¹‹ه’Œé¢„è¦é¢„وٹ¥¾pب»ںهQŒهڈٹ(qi¨¢ng)و—¶èژ·هڈ–و“v‹z‹ç‰§هœ؛çژ¯ه¢ƒهڈکهŒ–çڑ„ن؟،وپ¯هQŒن»¥éپ؟ه…چç”ںو€پç³»¾lںçڑ„ه´©و؛ƒه’Œçھپهڈ‘و€§çڑ„çپ‘ض®³هڈ‘ç”ںم€?/strong>
م€€م€€وˆ‘ه›½é»„و¸¤‹¹·هŒ؛ن»?015ٍq´ه¼€ه§‹ه…¨é¢هگ¯هٹ¨و“v‹z‹ç‰§هœّ™§‚‹¹‹ç½‘™ه¹ç›®هQŒهڑوŒپ“ن؛’èپ”网+‹¹نh´‹ç‰§هœ؛â€ï¼Œه®çژ°ه¯زژ(gu¨©)“v‹z‹ç‰§هœ؛çڑ„هڈ¯وµ‹م€پهڈ¯è§†م€پهڈ¯وژ§ï¼Œè¯¥é،¹ç›®é›†وˆگçڑ„‹¹·ه؛•è§†é¢‘观وµ‹م€پو“v‹z‹و°´è´¨ç›‘‹¹‹ه’Œه¤§ه‹ن¼‘é—²½ژ،çگ†ٍq›_ڈ°هQŒهچڈهٹ©و“v‹z‹ç‰§هœ؛ç®،çگ†ه’Œç”ںنٌ”ن؛؛ه‘کè°ƒوژ§و¸”ن¸ڑ؟U‘ه¦ه…ہL®–ç”ںنٌ”هQŒوڈگهچ‡و“v‹z‹ç‰§هœ؛ه®‰ه…¨و€§م€پç»ڈ‹¹ژه’Œç”ںو€پنh(hu¨¢n)ه€¼ه±•½C؛و“v‹z‹ç‰§هœ؛çڑ„ن؛§ن¸ڑه½¢è±،هQŒو™®هڈ?qi¨¢ng)و“v‹z‹و¸”ن¸ڑو–‡هŒ–çں¥è¯†م€‚èٹ±ن؟ٹç‰è‡ھن¸»ç ”هڈ‘ن؛?ji¨£n)و“v‹z‹ç‰§هœّ™؟œ½E‹و°´è´¨ç›‘‹¹‹ç³»¾lں,ه®çژ°ن؛?ji¨£n)相ه…دx°´è´¨هڈ‚و•°çڑ„é•؟وœںوœ‰و•ˆهœ°هœ¨¾U؟监‹¹‹ه’Œن¼ 输م€‚هœ¨è®¾è®،¾pب»ںçڑ„ن½“¾pب»“و„و—¶هQŒé¦–ه…ˆç»“هگˆو“v‹z‹ç‰§هœ؛çڑ„çژ¯ه¢ƒç‰¹ç‚¹م€پو°´ن؛§ç”ں物çڑ„ç”ںé•؟هڈ‘育ه½±ه“چه› ç´ ½{‰ç،®ه®ڑ监‹¹‹هڈ‚و•ژح¼Œکq›è€Œç،®ه®ڑن¼ و„ںه™¨çڑ„选و‹©هQŒه†چ¾l“هگˆه…¶ن»–و¨،ه—ه®Œوˆگ监وµ‹ç‚¹èتY¼‹¬نڑgçڑ„设è®،,ه…¶ن¸ه…¶ن»–و¨،ه—هŒ…و‹¬و•°وچ®ه¤„çگ†و¨،ه—م€پ网¾lœé€ڑن؟،و¨،ه—ن»¥هڈٹ(qi¨¢ng)甉|؛گو¨،ه—هQŒè®¾è®،ه®Œوˆگçڑ„监وµ‹ç‚¹ç³»¾lںç”±é…چه¥—çڑ„وصQو ‡è£…载,ن»ژ而هإوˆگ独立çڑ„监وµ‹ç‚¹ï¼Œوœ€¾lˆو¯ڈن¸ھ监‹¹‹ç‚¹é€ڑè؟‡GPRS/3Gکqœç¨‹é€ڑن؟،و–¹ه¼ڈه®çژ°و•°وچ®çڑ„و— ¾U؟ن¸ٹن¼ هئˆç”قq›‘وژ§èتYن»¶وک¾½C؛م€په¤„çگ†م€‚è؟کوœ‰ه¦è€…é’ˆه¯زژ(gu¨©)“v‹z‹ç‰§هœ؛çژ¯ه¢ƒç›‘وژ§éœ€و±‚,ه¼€هڈ‘ن؛†(ji¨£n)‹¹نh´‹ç‰§هœ؛çژ¯ه¢ƒو°´è´¨م€پو“v‹¹په®و—¶هœ¨¾U؟监‹¹‹وٹ€وœ¯هڈٹ(qi¨¢ng)装置هQŒه®çژîC؛†(ji¨£n)ه®و—¶هœ¨ç؛؟کqœç¨‹ç›‘وµ‹‹¹نh´‹ç‰§هœ؛‹¹·هںںو°´è´¨م€پو“v‹¹پç‰çٹ¶ه†µم€‚و€ضM½“ن¸ٹ,وˆ‘ه›½‹¹نh´‹ç‰§هœ؛è‡ھهٹ¨هŒ–监وژ§ç³»¾lںه¤ڑوک¯هœ¨ç‰¹ه®ڑ‹¹·هںںکq›è،Œè¯•éھŒهQŒنٌ”ن¸ڑهŒ–ه؛”用较ه°‘م€?/span>
و¥و؛گ | وœ¬و–‡èٹ‚选è‡ھم€ٹو“v‹z‹ç‰§هœ؛ه¾ڈ设وٹ€وœ¯ç ”½I¶è؟›ه±•م€?/span>
ن½œè€?/span> | çژ‹و ‹و¢?ن½™و™¯ 陈ن¸•èŒ?1.ن¸ه›½و°´نٌ”؟U‘ه¦ç ”究院هچ—‹¹نh°´ن؛§ç ”½I¶و‰€هQ?/span>2.ن¸ٹو“v‹¹نh´‹ه¤§ه¦‹¹نh´‹؟U‘ه¦ه¦é™¢
وژ’版و¥و؛گ | و•°و™؛‹¹نh´‹ه…¬ن¼—هڈ?


 ¾_¤ه…¬¾|‘ه®‰ه¤?4010502001742هڈ?/a>
¾_¤ه…¬¾|‘ه®‰ه¤?4010502001742هڈ?/a>